Are autonomous control systems taking the drone racing world by storm?
Introduction
Drone racing has rapidly evolved from a niche hobby to a high-tech competitive sport, attracting enthusiasts and professionals alike. The integration of Artificial Intelligence (AI) into drone racing is a game-changer, enhancing performance, strategy, and viewer engagement. In this article, we explore how AI is transforming the world of drone racing and what the future holds for this emerging thrilling sport.
The Evolution of Drone Racing
Drone racing involves pilots manoeuvring drones through intricate courses at high speeds, relying on first-person view (FPV) goggles for navigation. The sport demands quick reflexes, precision, and strategic planning. As drone technology advances, integrating AI is becoming its crucial aspect.
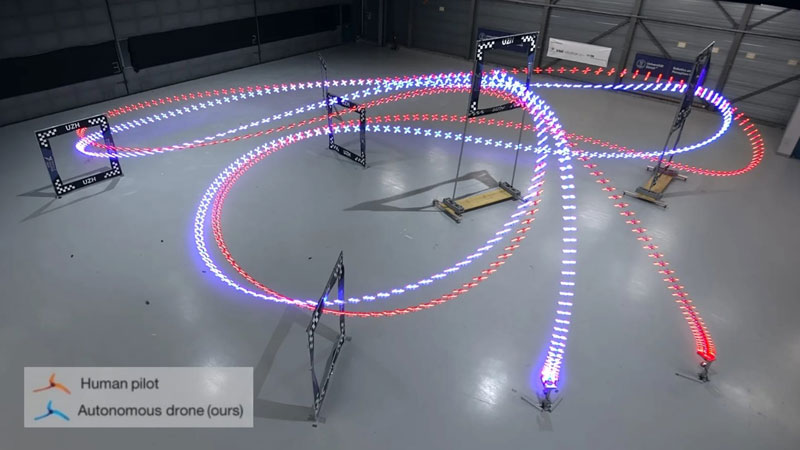
Case study: How an AI system designed by researchers at the University of Zurich has beaten world champions in a series of drone races.
An AI system designed by researchers at the University of Zurich has beaten drone racing world champions in a series of drone races. The drone/ project title Swift AI, was pitted against three world-champions, in first-person view (FPV) drone racing.
The Swift AI won multiple races against three world-class champions in first-person view (FPV) drone racing, pilots fly quadcopters at speeds exceeding 100km/h (62mph), controlling them remotely while wearing a headset linked to an onboard camera.
Real-Time Reaction and Data Processing
These quadcopters flying at exhilarating speed of 100km/h were controlled remotely, by the players wearing VR headset, which took inputs from the onboard camera. Similarly, the Swift AI pilot, reacted and took necessary action, in real-time by collecting data from the onboard camera of the drone. The aerial race track circuit consisted of multiple checkpoints/gates which the drones, had to pass through. This was done through an integrated inertial measurement unit. Which measures the acceleration and speed, while an artificial neural network processes the camera data to localize the drone in space and detect the gates along the racetrack. In a matter of few seconds itself, this real time information is fed to a control unit, which is also based on a deep neural network. Through this data, the drone manoeuvres itself and chooses the best possible actions to complete the circuit as quickly as possible.
Training in Simulated Environments
Most unmanned drone racers to date have used external position-tracking systems to control their trajectories precisely. Swift, however, was trained in a simulated environment where it taught itself to fly by trial and error using reinforcement learning. The use of simulation helped avoid destroying multiple drones in the early stages of learning when the system often crashed.
Overall, after multiple training flights and simulations, Swift achieved the fastest lap, with a half-second lead over the best lap by a human pilot. On the other hand, human pilots proved more adaptable than the autonomous drone, which failed when the conditions were different from what it was trained in simulations. For example, if there was too much light in the room.
Conclusion
The success of Swift AI in drone racing marks a significant milestone in the application of AI in physical sports. By overcoming the unpredictability of the physical world, AI systems like Swift can revolutionize competitive sports, pushing the boundaries of what is possible with autonomous technology.
Citations: